Патч клона ST-Link
Колись я вже жалівся, що китайський клон ST-Link v2 не має виходу RESET для STM32.
Дещо пізніше від автора цього чудового перехідника між клоном ST-Link, стандартним 20-контактним з’єднувачем JTAG, однорядними штирями STM32FxDiscovery і платкою BluePill (+ ще щось, що мене наразі не цікавить), я дізнався, що клон ST-Link можна підправити.
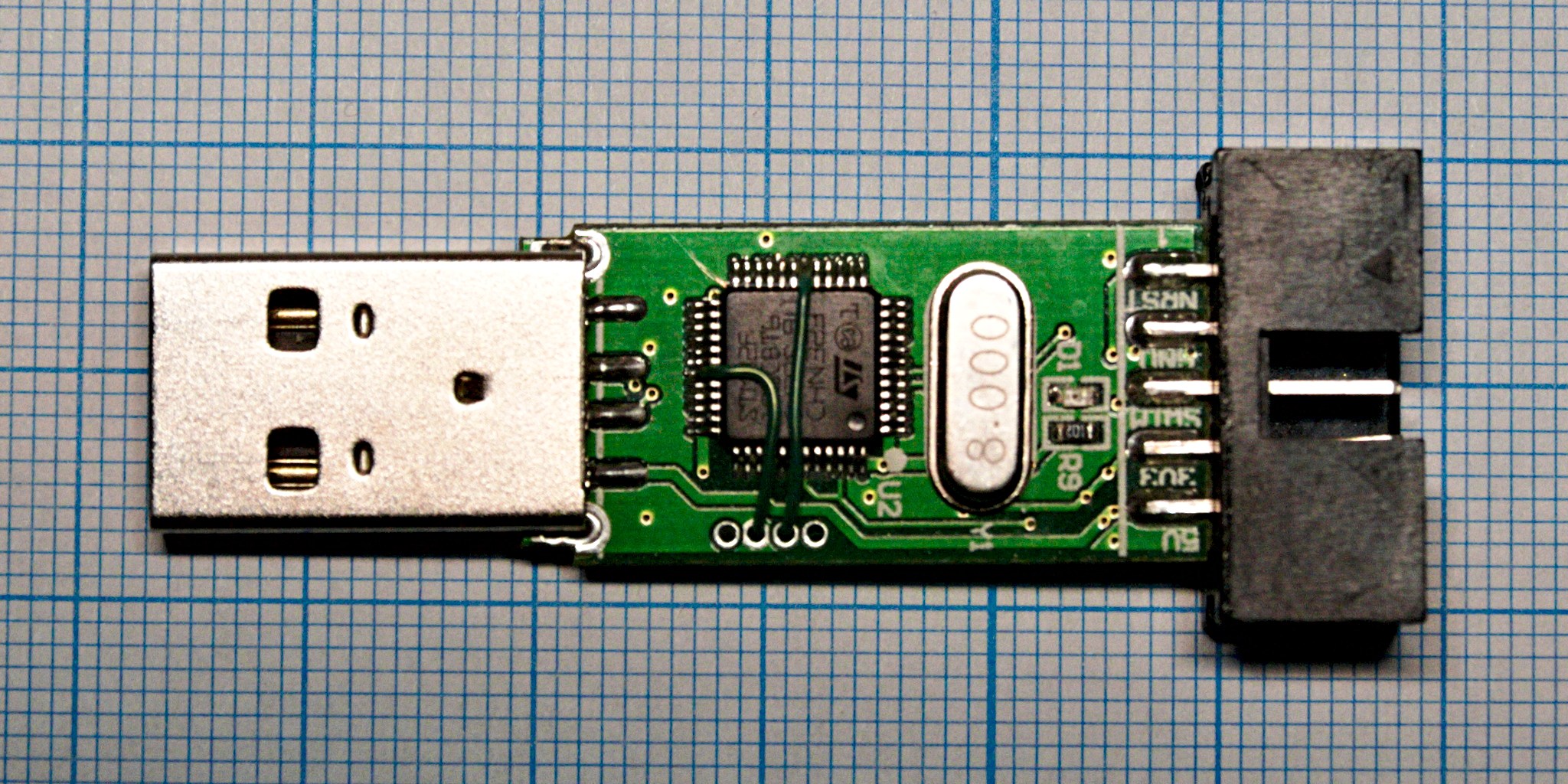
Потрібні сигнали проcто не виведені на штирі. Якщо підтримка STM8 непотрібна, можна штирі SWIM і RESET (STM8) відрізати від сигналів, а туди вивести SWO і RESET (STM32). На сторінці проекту написано, які виводи мікроконтролера слід під’єднати до штирів.
Після ознайомлення я навіть знаходив якийсь допис з рекомендаціями-фотографіями по такому виправленню. Після відрізання доріжок від штирів RESET і SWO автор на їхні кінчики напаяв 22-омні резистори, а вже до них припаяв дротики.
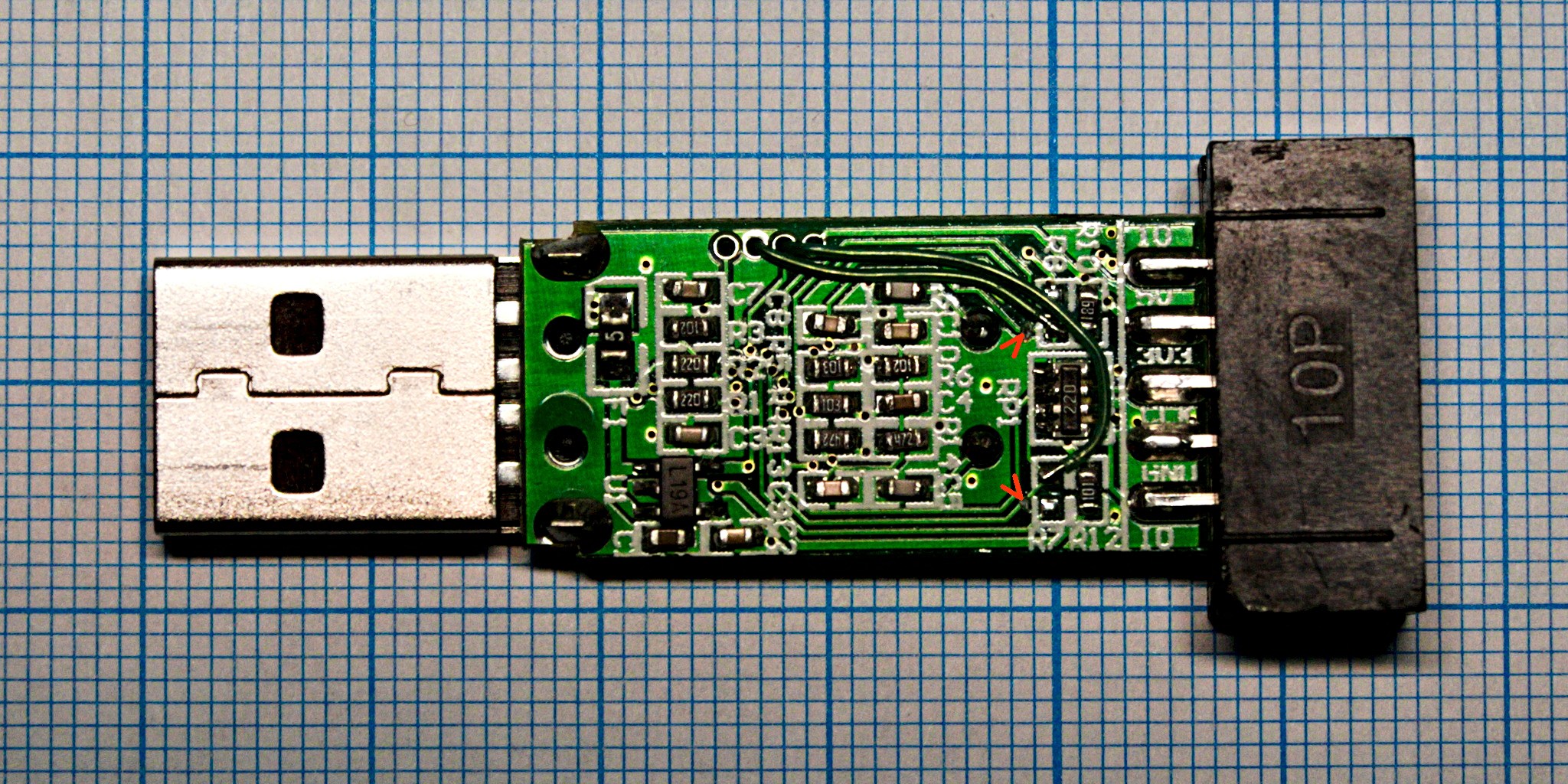
Коли я зрештою сів паяти, я помітив, що можна все зробити простіше. На нижній стороні плати зняти резистори R7 і R8, які приєднують до штирів виходи, перерізати доріжки, що йдуть до ближніх до резисторної збірки кінців цих резисторів (червоні позначки на фото), а тоді припаяти дротики до контактних майданчиків цих резисторів. На штирі сигнали потраплять через резистори зі збірки.

 українська
українська english
english